Planning with Multi-Constraints via Collaborative Language Agents
Abstract
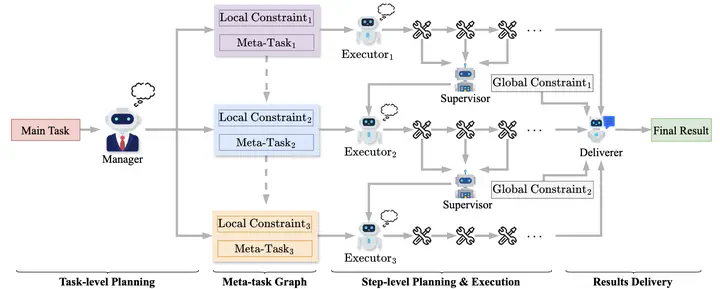
The rapid advancement of neural language models has sparked a new surge of intelligent agent research. Unlike traditional agents, large language model-based agents (LLM agents) have emerged as a promising paradigm for achieving artificial general intelligence (AGI) due to their superior reasoning and generalization capabilities. Effective planning is crucial for the success of LLM agents in real-world tasks, making it a highly pursued topic in the community. Current planning methods typically translate tasks into executable action sequences. However, determining a feasible or optimal sequence for complex tasks with multiple constraints at fine granularity, which often requires compositing long chains of heterogeneous actions, remains challenging. This paper introduces Planning with Multi-Constraints (PMC), a zero-shot methodology for collaborative LLM-based multi-agent systems that simplifies complex task planning with constraints by decomposing it into a hierarchy of subordinate tasks. Each subtask is then mapped into executable actions. PMC was assessed on two constraint-intensive benchmarks, TravelPlanner and API-Bank. Notably, PMC achieved an average 42.68% success rate on TravelPlanner, significantly higher than GPT-4 (2.92%), and outperforming GPT-4 with ReAct on API-Bank by 13.64%, showing the immense potential of integrating LLM with multi-agent systems. We also show that PMC works with small LLM as the planning core, e.g., LLaMA-3.1-8B.